


A hopping robot called SpaceHopper is built to jump, by leveraging an asteroid or moon’s low-gravity, then orient and stabilize itself mid-air before safely landing on the ground. From there, it repeats this process to efficiently span large distances.
While SpaceHopper, the three-legged robot developed by former students at ETH Zürich, is ultimately designed to explore asteroids and moons, testing its capabilities on these distant celestial bodies is not a feasible option for initial trials. However, thanks to a collaboration with the European Space Agency – ESA and Novespace, a company specializing in zero-gravity plane rides, the SpaceHopper team has found a way to put their robot through its paces in a simulated low-gravity environment.
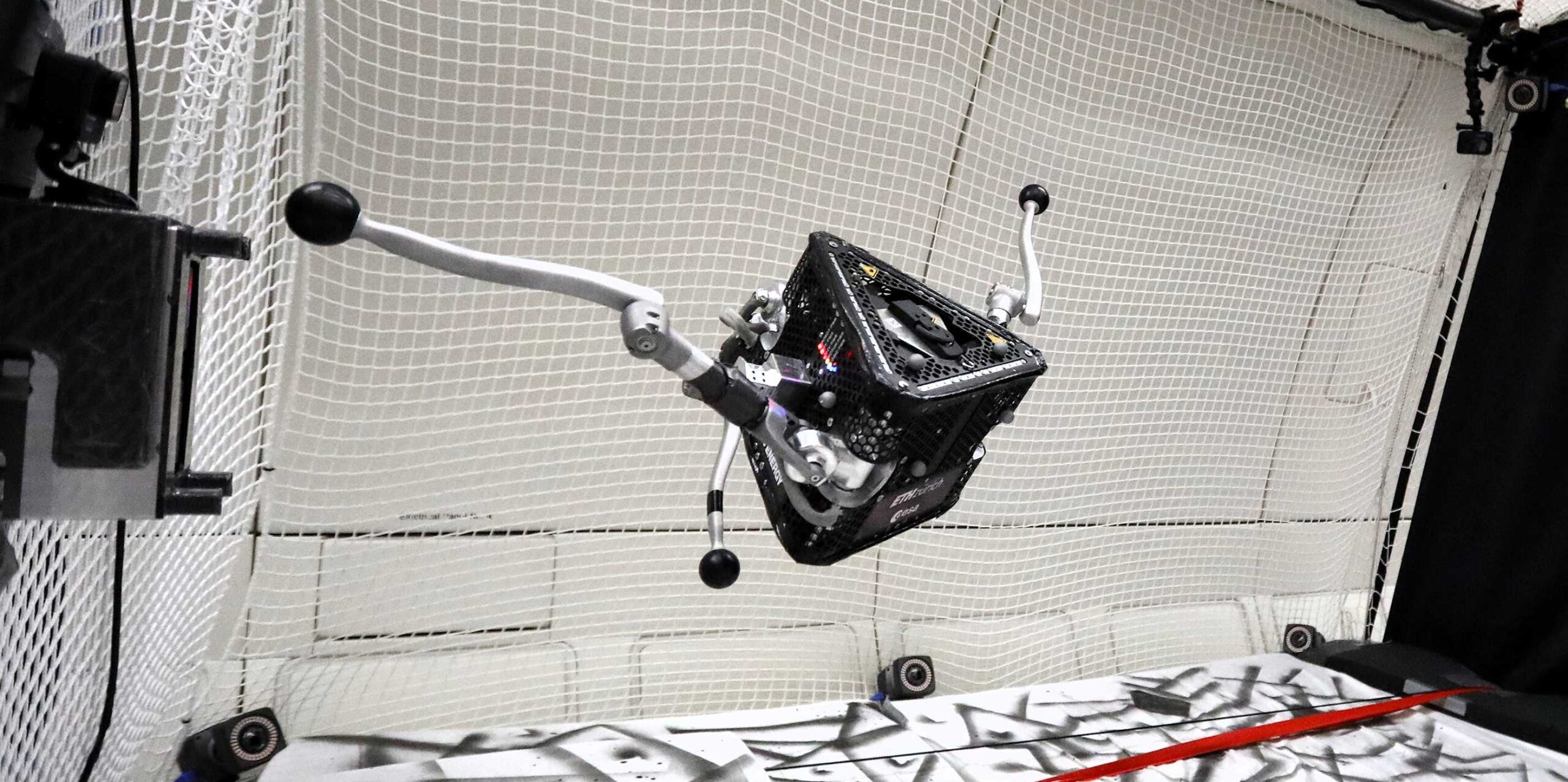
Parabolic flights, often referred to as “zero-gravity flights,” provide a unique opportunity for researchers to test their experiments and equipment in conditions that closely mimic the low-gravity environments found on small celestial bodies. These flights are conducted using specially designed aircraft that perform a series of maneuvers, creating brief periods of weightlessness lasting around 20-30 seconds each.
During these parabolic flights, SpaceHopper showcased its innovative design, which utilizes three legs for reorientation during flight, eliminating the need for traditional gyroscopes or flywheels. By employing Deep Reinforcement Learning, the researchers have optimized the leg motion control, enabling SpaceHopper to jump, stabilize itself midair, and land with remarkable precision.
𝗡𝗲𝘅𝘁 𝗦𝘁𝗼𝗽 — 𝘁𝗵𝗲 𝗠𝗼𝗼𝗻
The 6-kilogram SpaceHopper is made of space-grade aluminum. The robot’s limbs are powered by motors made by Swiss firm Maxon, the same firm that produced electrical motors for NASA’s Perseverance Mars rover, which is exploring the red planet.
The mechanical parts are mostly space-ready. The electronics are not. The neural network trained in the simulator runs on an Nvidia Jetson Nano microcomputer that would have to be swapped for a space-hardened processor for a real space mission. Modifications for a mission to the Moon are in progress.
The success of the parabolic flight tests marks a significant milestone for the SpaceHopper project, validating the robot’s design and control systems in a low-gravity environment. By proving its ability to navigate and explore in these challenging conditions, SpaceHopper has taken a crucial step towards its ultimate goal of being deployed on future space missions to investigate low-gravity asteroids and moons.